

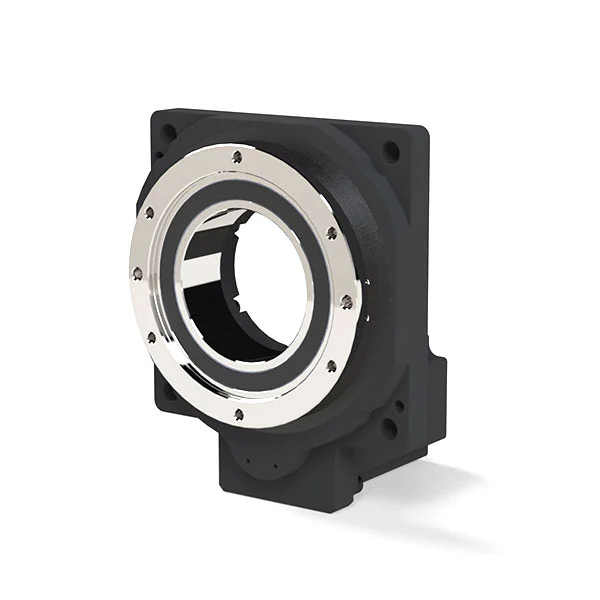

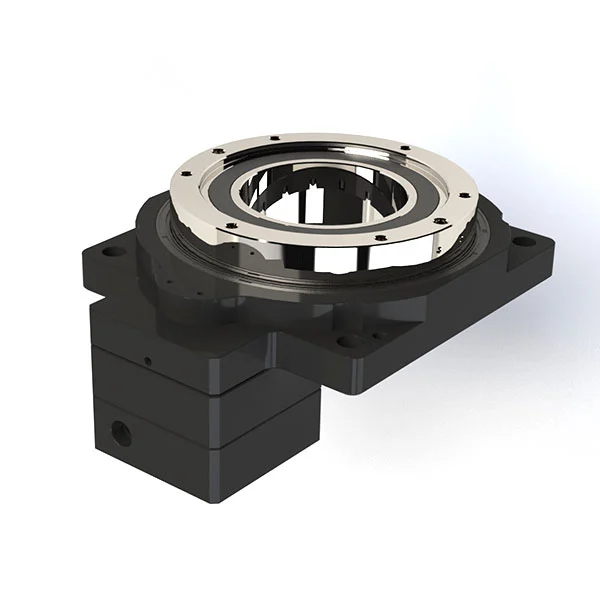



Hollow Rotary Platformは、高精度のギア構造と放射状ベアリングを使用してトルクと剛性を改善し、より安定した負荷ベアリングを可能にします。サーボモーターまたはステッパーモーターとペアになると、任意の角度除算を実行できます。インデクサーが達成できないデジットコントロールを満たすだけでなく、ダイレクトドライブモーターのそれに匹敵するポジショニングの精度を持っているだけでなく、短期間で慣性負荷のポジショニングを実現できます。
中空ロータリープラットフォームのインストール手順
 まず、モーターがプラットフォームと一致するかどうかを確認し、表面上の異物を削除します。 |
② 遷移フランジのフラットエンドネジを取り外し、入力端を回転させて、ロックリングの固定ボルトが表示されるまで位置を調整します。 |
③ モーターシャフトをレデューサーの入力端に整列させ、還元剤に挿入し、接続ボルトを斜めに事前に照らします。 |
 ロックリングを締め、ボルトを締めます。トルクについては、以下の表を参照してください。 |
⑤ トルクレンチを使用して、固定ネジを斜めに締めます。トルクについては、以下のトルクテーブルを参照してください。 |
⑥ フラットエンドネジを締めます。 |
シャフトスリーブの設置

中空ロータリープラットフォームの選択ポイント
輸送されるオブジェクトの負荷/慣性の計算(JW)
輸送されるオブジェクトの慣性は、標準として送信装置の30倍未満である必要があります。
出力端
■加速トルク(TA)の計算
次の式を参照してください。
加速トルクt [n・m] =(jm + jw) *π/30 *(n₂ -n₁)/t₁)
ここで、JM:モーターの慣性[kg・m²]; JA:メカニズムの慣性[kg・m²]; JW:負荷の慣性[kg・m²]; n₂:動作速度[r/min]; n₁:開始速度[r/min]; T₁:加速(減速)時間[s]。
■必要なトルクの計算
必要なトルクは、摩擦インピーダンスによって引き起こされる負荷トルクの合計と、安全係数によって慣性によって引き起こされる加速トルクを掛けることによって計算されます。
必要なトルクt =(負荷トルク[n・m] +加速トルク[n・m])×安全係数=(tl + ta)×S。安全係数Sは1.5より大きい。
■モーターの選択
モーターに必要なトルクTは、速度トルクの仕様範囲内でなければなりません。
ステッピングモーターの速度トルク特性曲線。
住所
中国浙江省杭州市蕭山区東風村148号














